



![]()
By Peter Homer
How does one guy in Maine transform a pile of failures sitting on his dining room table into one of the biggest innovations in spacesuit glove technology since the beginning of human space flight? This is a story about what it took to compete in and win the 2007 Astronaut Glove Challenge, one of seven competitions organized under NASA’s Centennial Challenges program.
I learned about the competition by accident, browsing the Web. The Astronaut Glove Challenge was designed to promote the development of a highly dexterous and flexible glove that could be used by astronauts over long periods of time for space or planetary surface excursions. It brought competitors to a single location for a head-to-head competition using gloves they designed and fabricated themselves. Each team was required to perform a variety of tasks with their gloves and was scored on glove performance against each other and the current NASA Phase VI glove. One of the things that interested me was that competitors had to build the hardware; this wasn’t just a design competition. At the time, I was heading up a medium-sized nonprofit and had been away from aerospace engineering for a while, so this was to be strictly a personal challenge, a “science project” to pursue in my spare time. Creating a better astronaut glove appealed to me because it would be a good test of my skills and was a small enough project to do in my garage. As it turned out, the bulk of the fabrication took place on my dining room table.

Several versions of Homer’s glove show his idea’s progress.
Photo Credit: Matthew Z. Homer
At the kickoff meeting held a year before the competition, I learned about pressure suits and got my first (and only) look at the Phase VI glove. A 4.3 psi pressure differential between the inside and outside of the glove didn’t seem to be a big deal to me, but when I had the opportunity to try the Phase VI out for a few minutes in a depressurized glove box, and heard astronaut Carl Walz describe the problems that he and others had with spacesuit gloves while performing extravehicular activities, or EVAs, I was surprised at how stiff the glove became and how difficult it was to use. I had a decade and a half of experience designing satellites, but I had never worked in human space flight and had no knowledge of spacesuit design. I wasn’t able to find much useful information and found nothing specifically about how to fabricate and test a pressurized glove. I had to learn or invent everything from scratch.
My hope was to come up with a new and radically different approach to spacesuit glove design. I spent the first nine months after the kickoff meeting just thinking about ideas and sketching them out. Rather than copy the two-layer approach of the current design, I thought it would be better to combine the restraint and air-containing “bladder” layers into a single, reinforced rubber layer. Once I began to make and test prototypes, however, I discovered that my new “great idea” was an utter failure. With less than two months to go before the competition, I was starting all over! But something good came out of that catastrophic failure. It forced me to look for a new way to attack the problem—there wasn’t enough time for the usual design/analyze/validate/build approach. Instead, I decided to use “incremental” failure as a tool to learn rapidly. Had I not taken this path, I believe I would not have finished in time.
I decided to focus all my effort on just the finger element. If I couldn’t come up with a more flexible finger, there was no point in spending time on the rest of the glove, I reasoned. So I devised a simple test fixture that allowed me to build and pressurize finger elements in about twenty minutes, and I spent the next few weeks designing and making glove fingers. A lot of fingers. Probably three dozen in all. Every one of those fingers (except the last) was a little failure, but every one taught me something about what did and didn’t flex easily, or about how to streamline the fabrication process, or what materials and design elements were or were not important.
About six weeks before the competition date, I had a breakthrough “Aha!” moment. I knew I needed to constrain the pressure inside the glove’s finger but at the same time allow it to flex. Late one night I came up with the idea of creating a “linkage” across the joint of the finger, but I was struggling with how to do it. I was applying strips of tape to my fingers in an attempt to simulate links when I came up with the “X” design that allowed me to make a fist without feeling any resistance from the tape. I knew I had a winner, and after a few more iterations, I had created a working flexible finger design. The next task was to join four of these fingers to a palm and to develop a functional metacarpal (knuckle) joint. It took quite a few tries to figure this part out, not just the mobility element, but also the patterning and fabrication sequence. I followed the same process of incremental failure to learn and ultimately to come up with a flexible metacarpal joint.
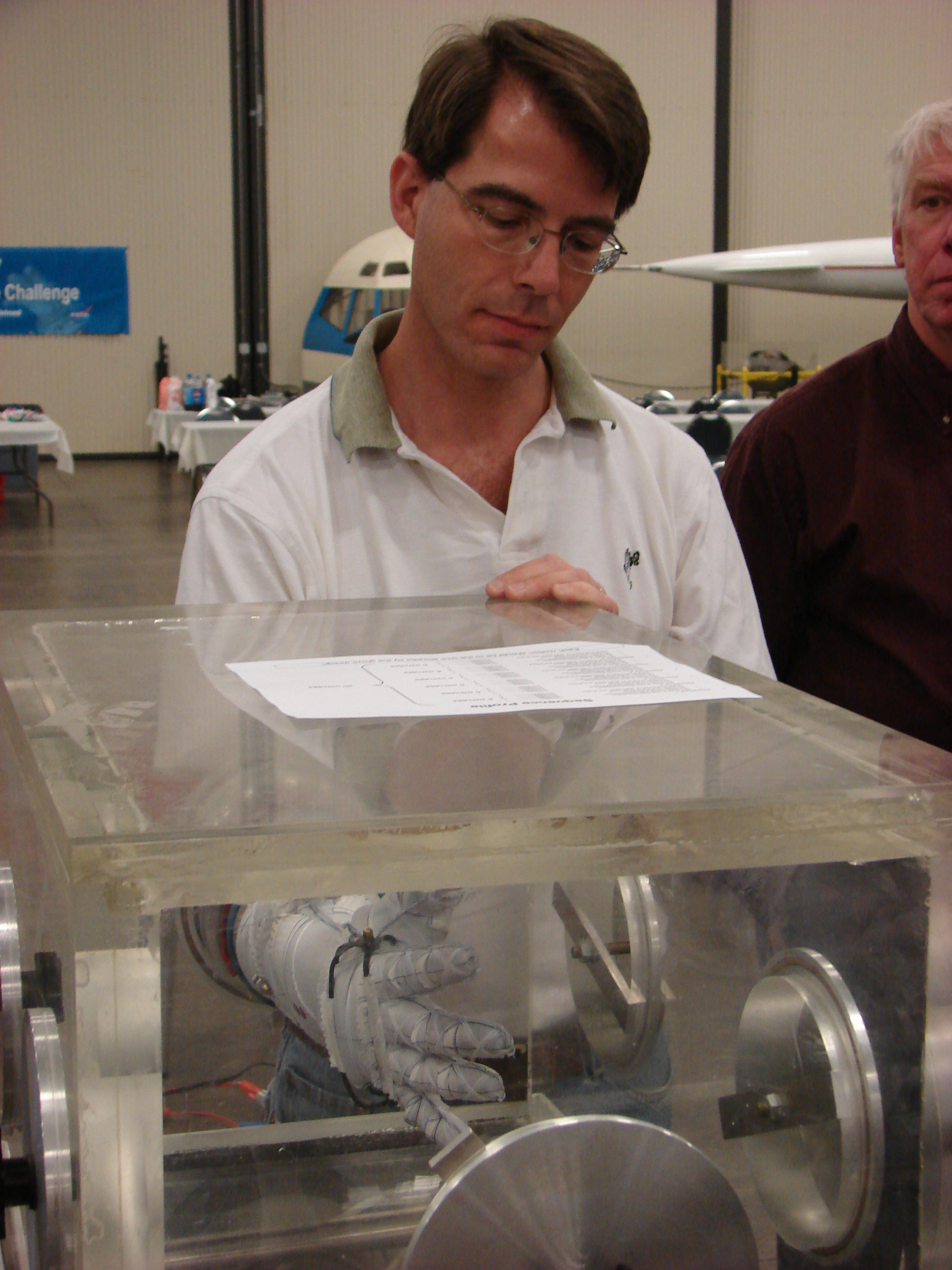
Homer pressure tests his glove.
Photo Credit: Matthew Z. Homer
I followed the same process for the thumb articulation, and finally the wrist joints, with less time available for each. The final step was putting all the elements together into a complete glove. I only had one day to accomplish this, but, because I knew each element worked and I had refined the patterning and fabrication sequence (and my fabrication skills) through all that repetition, I was confident I could pull it off. As it turned out, I was only able to test the first glove in my homemade glove box for about an hour because I had to get back to work fabricating the second, identical glove the rules required. That marathon build session lasted until it was time to leave for the event, so I first tried out the second glove during the actual competition.
Once the event began, I learned that five teams had registered to compete—four individuals like myself, and Team MDLH, which included spacesuit mobility expert Gary Harris, aerospace engineer Pablo de Leon of the University of North Dakota, and Nik Moiseev, who until 2005 was an engineer with the Russian firm Zvezda that designed that country’s current and Sovietera spacesuits. Two teams dropped out before the competition started because they had not finished their gloves in time. So the official lineup was myself; Ted Southern, a graduate art student from Pratt Institute in New York; and Team MDLH. And of course the “house glove,” NASA’s Phase VI glove.
After going over some preliminaries, the competitors were asked to bring out their gloves. This was the first opportunity to see each other’s work, and it was immediately apparent that there were three very different designs. Aside from some initial “acceptance” testing (length, weight, leak check), there were three major components to the scoring: strength, flexibility, and comfort/dexterity. The first challenge was a burst test to evaluate overall strength. Each competitor chose one glove to be slowly pressurized until it failed. The higher the pressure before failure, the higher the score. I chose my first glove, the one I had tested, because I was afraid that it didn’t have enough “life” left in it to get through the thirty-minute dexterity test. I was relieved to see it go to almost 22 psi before failing, well over the 13 psi qualifying minimum. Unfortunately, Ted Southern’s entry didn’t reach the minimum required pressure, which disqualified him from the remainder of the competition. It was now down to me, Team MDLH, and the Phase VI glove. Team MDLH’s glove survived to more than 29 psi, putting them in an early lead.
The next day began with finger flexibility measurements using a force gauge on the pressurized gloves, including the Phase VI glove. Many measurements were taken by test engineers from Hamilton Sundstrand, the prime contractor for the current EVA suit. Because the raw measurements needed to be converted to torques and combined into a final score, it was impossible to keep track of who was ahead in this phase. The final comfort and dexterity test was performed in a depressurized glove box to simulate real on-orbit conditions. Each competitor was required to exercise the glove through a defined set of finger, thumb, and wrist motions without any sign of abrasion or bruising of the competitor’s hand. I learned a lot about arm fatigue! This was a pass-fail event, and both of the remaining competitors came through intact. After taking what seemed like an eternity to tally the final scores, the judges announced that I had won the competition. My glove was the only one to have achieved lower finger-bending torques than the Phase VI glove.

Homer sews his glove concept.
Photo Credit: Matthew Z. Homer
Looking back, I see three sources of the success of this project that I believe also operate in other programs where small teams have broken new ground in aerospace technologies. These are awareness, failure, and trust. By remaining aware of the big picture, continuously asking myself, “Am I converging on a solution?” and “Am I converging fast enough?” I was able to see that my original design was not going to succeed, leading to the decision to start over. I was also aware that, had I lingered over this choice or taken time to analyze it, I would not have been ready on the first day of competition. Failure forced me to look outside conventional thinking and opened the door to innovation. Choosing to make incremental failures enabled me to rapidly climb the learning curve. Trusting my “gut” feelings—which are really an internalized accumulation of experiences—and my newly acquired skills allowed me to devise new technologies rapidly and complete both gloves just in time. Awareness, failure, and trust are intertwined: failure provides experiences that inform awareness and provide decision-making opportunities that build trust among team members and managers while opening minds to new pathways for development. All three are necessary for teams—large or small—to achieve big innovation.
This story was told as part of a broader presentation on how small teams achieve big innovation, delivered at NASA APPEL Masters Forum 15 on October 16, 2007, in Phoenix, Arizona. For more information about the Centennial Challenges, visit http://centennialchallenges.nasa.gov.
About the Author
 |
Peter Homer has ten patents related to space structures, thermal control, and deployables. His career in aerospace spans more than two decades, most recently developing commercial communications satellites for Lockheed Martin Space Systems (formerly GE Astro Space) and leading configuration and design of the A2100 spacecraft bus structure. His experience also includes systems engineering and engineering management for software giants SDRC, Netscape, AOL, and Sun Microsystems and organizational leadership in the nonprofit world. |

