

![]()
By Frank J. Cepollina and Jill McGuire
NASA’s Goddard Space Flight Center pioneered satellite servicing more than thirty years ago with the historic Solar Maximum Repair Mission. That mission laid the groundwork for four successful servicing missions to the Hubble Space Telescope (HST) and the development of the HST Robotic Servicing and De-orbit Mission (HRSDM). Separately and independently, the Department of Defense (DoD) has been refining its capabilities to refuel and reconfigure on-orbit satellites robotically and autonomously. By collaborating, NASA and DoD can validate their technologies and prepare more efficiently for future space robotics missions. A national system for on-orbit servicing would provide an important capability for a broad range of missions.
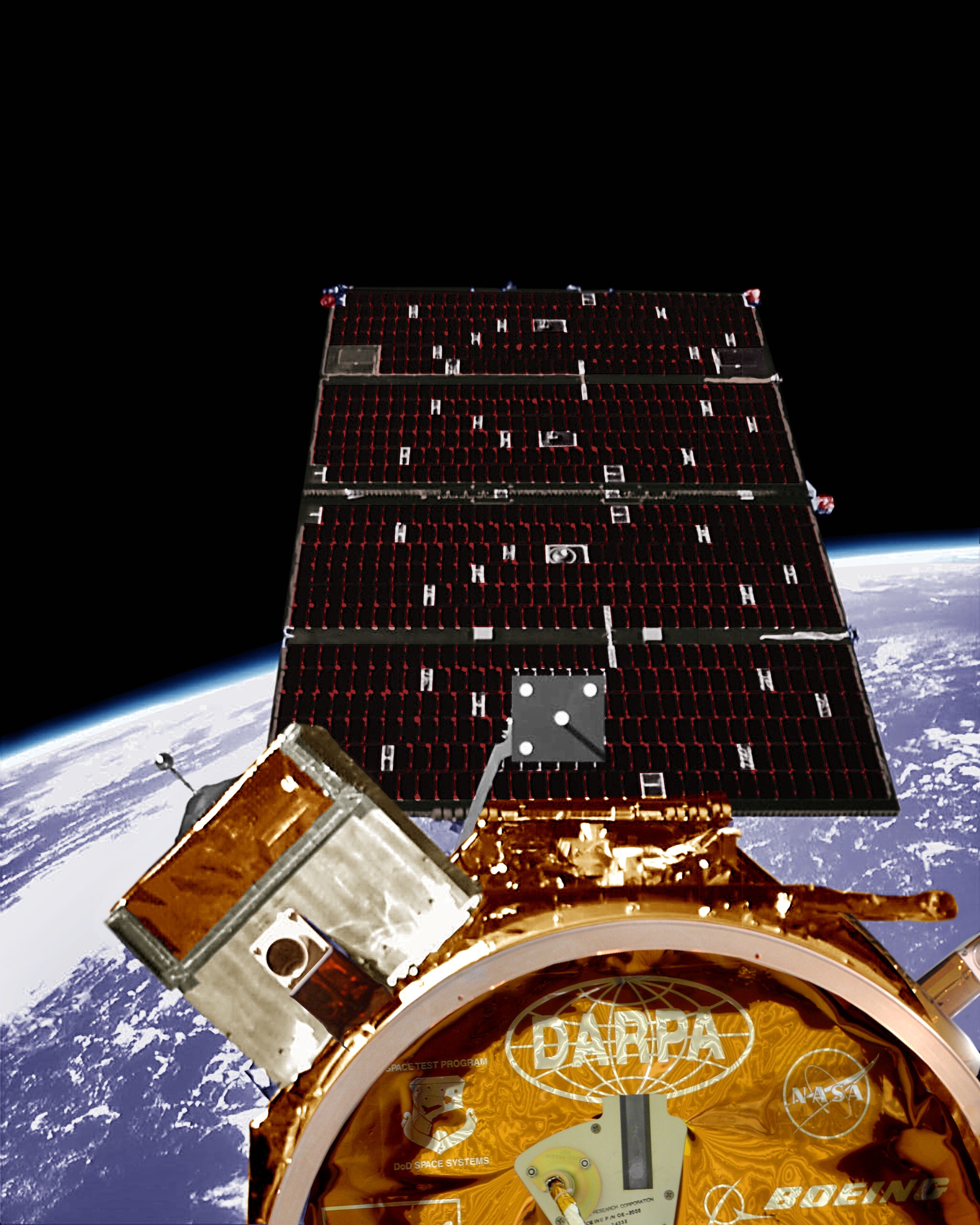
Orbital Express during on-orbit testing.
Photo Credit: DARPA
NASA and DoD have been collaborating since 1958. NASA’s Space Shuttle program has flown eleven dedicated missions for the DoD, providing access to more than 250 secondary DoD payloads, as well as transportation to Mir, the Russian space station. Other successful collaborations include the National Polar-Orbiting Operational Environment System, a tri-agency program that merged the DoD and Department of Commerce–National Oceanic and Atmospheric Administration polar-orbiting weather satellite programs, and Clementine, a DoD–NASA technology-demonstration mission to survey the moon. Another collaboration, one often forgotten, is the sharing of vehicles in the Evolved Expendable Launch Vehicle program; in fact, NASA developed the Atlas and Delta launch vehicles that the military has relied on for the past twenty years.
Although NASA and the DoD may use some technologies differently, and in some cases DoD work is classified, the two organizations deal with many of the same issues, technical challenges, and requirements. Propulsion, materials, avionics, and launch technologies are ideal areas of joint technology development. Even the NASA Mars exploration missions have benefited from technical collaboration with the U.S. Air Force, using the air force–developed RAD6000 32-bit microprocessors and lithium ion batteries for both planetary rovers. For the most part, NASA and DoD personnel can team together on technology development or basic research. After the development phase, the DoD will transfer many of the technologies to be used on classified programs. Whenever the organizations’ goals coincide—for instance, on ways to maneuver, communicate, experiment, or work in space—collaboration leads to the optimal access to equipment, processes, and procedures for both organizations. The collaborations can maximize resources in many areas, making optimal use of the American taxpayers’ investment.
Learning from Hubble and Orbital Express
Goddard’s year-and-a-half effort on HRSDM involved rapidly developing a spacecraft with a robotic grapple arm, a two-armed dexterous robot, a vision system, twenty-four robotic tools, robotcompatible Orbital Replacement Units, and ground stations to support the robotic operations. Considerable effort was spent on detailed kinematic and dynamic work-site analysis, operational scenarios, and ground and neutral buoyancy evaluations using protoflight hardware.
As a result, Goddard has developed broad capabilities, technology, and space robotics expertise in autonomous rendezvous and capture, dexterous robotics, end effectors (the working devices at the end of robot arms) and tools, teleoperation, vision/situational awareness, assembly and servicing automated tools, and robotic-controlled de-orbit. Much of that technology will be used for the Hubble servicing mission.
While this work was going on at NASA, Defense Advanced Research Projects Agency (DARPA)—the DoD’s technology research center—was creating the infrastructure to support the Orbital Express mission. Orbital Express demonstrated the technical feasibility of robotic, autonomous, on-orbit refueling and reconfiguration of satellites to support a broad range of future U.S. national security and commercial space programs. DARPA led the development of two new spacecraft, a robotic grapple arm, robot-compatible Orbital Replacement Units, refueling tanks, support hardware, and ground stations.
Building on that highly successful mission, DARPA developed the Front-End Robotic Enabling Near-Term Demonstration (FREND), which includes the robotic arm, sensor suite, and algorithms that have successfully demonstrated advanced, autonomous, unaided grappling of a simulated spacecraft with no a-priori knowledge of the spacecraft and with no standard, robotic-friendly targets or interfaces on the spacecraft.
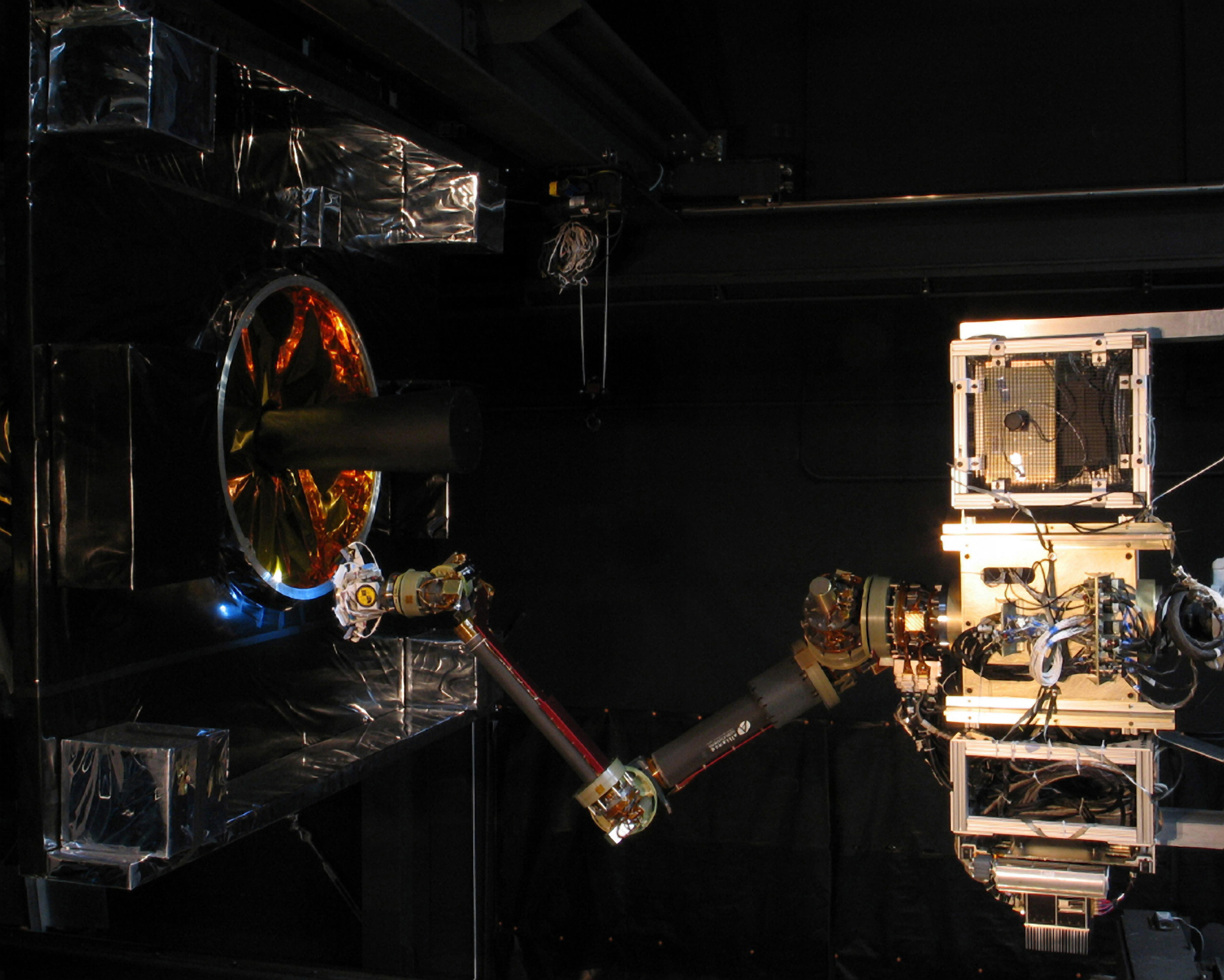
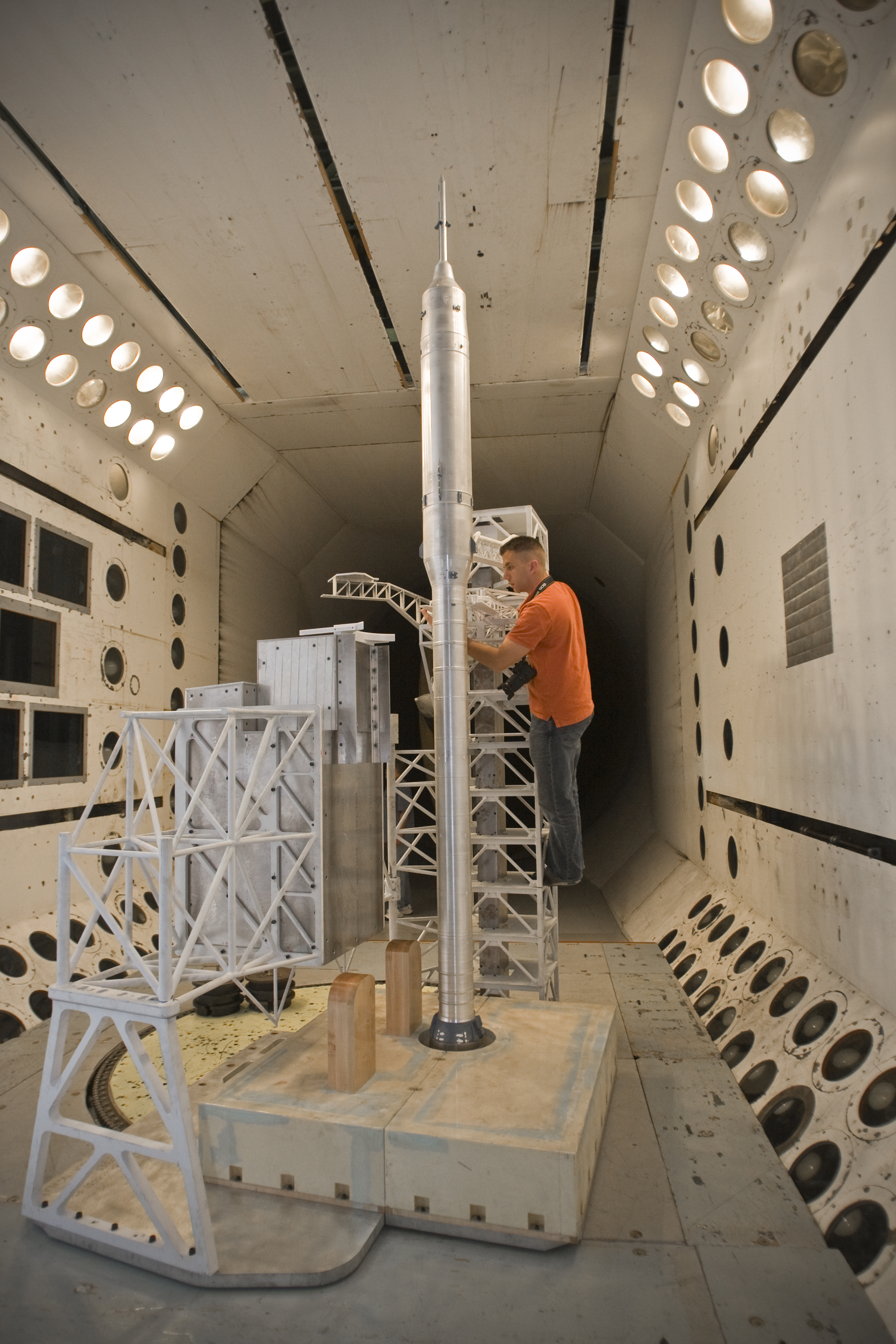
The Front-End Robotic Enabling Near-Term Demonstration underwent full-scale rendezvous and autonomous robotics grapple testing at the Naval Research Laboratory’s Spacecraft Proximity Operations Test Bed.
Photo courtesy the Naval Research Laboratory
These separate but complementary NASA and DoD activities validated technologies and sowed the seeds for collaboration during DARPA’s Orbital Express mission and FREND activities, when Goddard experts were brought in to provide technical expertise and oversight. During Orbital Express, DARPA management entrusted NASA personnel with technical oversight in areas including relative navigation and advanced video guidance sensors, robotic systems, and mission operations. When necessary, NASA personnel were able to get the appropriate security clearances. Because the robotic system used on Orbital Express had many commonalities with the system developed for Goddard’s HRSDM, the contractor providing the system applied several lessons learned from HRSDM to develop a simpler architecture and optimized control system for Orbital Express. It became apparent that because NASA and DoD had many common capabilities, the Orbital Express mission could have been performed sooner if the two agencies had collaborated earlier. Also, lessons learned from Orbital Express can be applied to future collaborations on in-space servicing.
Future Collaboration
Because the work accomplished at Goddard in the areas of robotic servicing and relative navigation is synergistic with much of the work done at DoD, it would be beneficial to combine efforts and funding resources for future in-space NASA and DoD space robotics missions. One potential symbiotic relationship is on the FREND program, as DARPA is looking for a mission partner who can build the spacecraft onto which the FREND robotic arms and sensors can be mounted.
Little work has yet been done to optimize FREND’s end effectors, something Goddard spent considerable time doing during HRSDM. In addition to being able to integrate and test the FREND mission in Goddard’s facilities, the center has considerable expertise planning on-orbit servicing operations, dating from the Solar Maximum Repair Mission in 1984 to current Hubble repair and upgrade missions. A collaborative effort incorporating this on-orbit experience and the lessons learned from a NASA–DoD FREND mission into the design and development of an Orion-type service module that can operate either in an astronaut environment or an autonomous/ robotic environment would create a new national capability for on-orbit servicing of space assets that could even be applicable to commercial communications satellites.
No one should downplay the challenges of collaboration seen in the past. In the Evolved Expendable Launch Vehicle program, for example, both the Boeing Delta IV and the Lockheed Atlas V had to undergo separate DoD and NASA certification processes. This is currently the case with the SpaceX Falcon launch vehicle.
SpaceX underwent a review by Aerospace Corporation for the DoD and a separate review by NASA. Programs funded by multiple agencies present challenges when design trade-offs are required. These trade-offs lead to the accumulation of excessive requirements, one of the biggest risks of NASA–DoD collaborations.

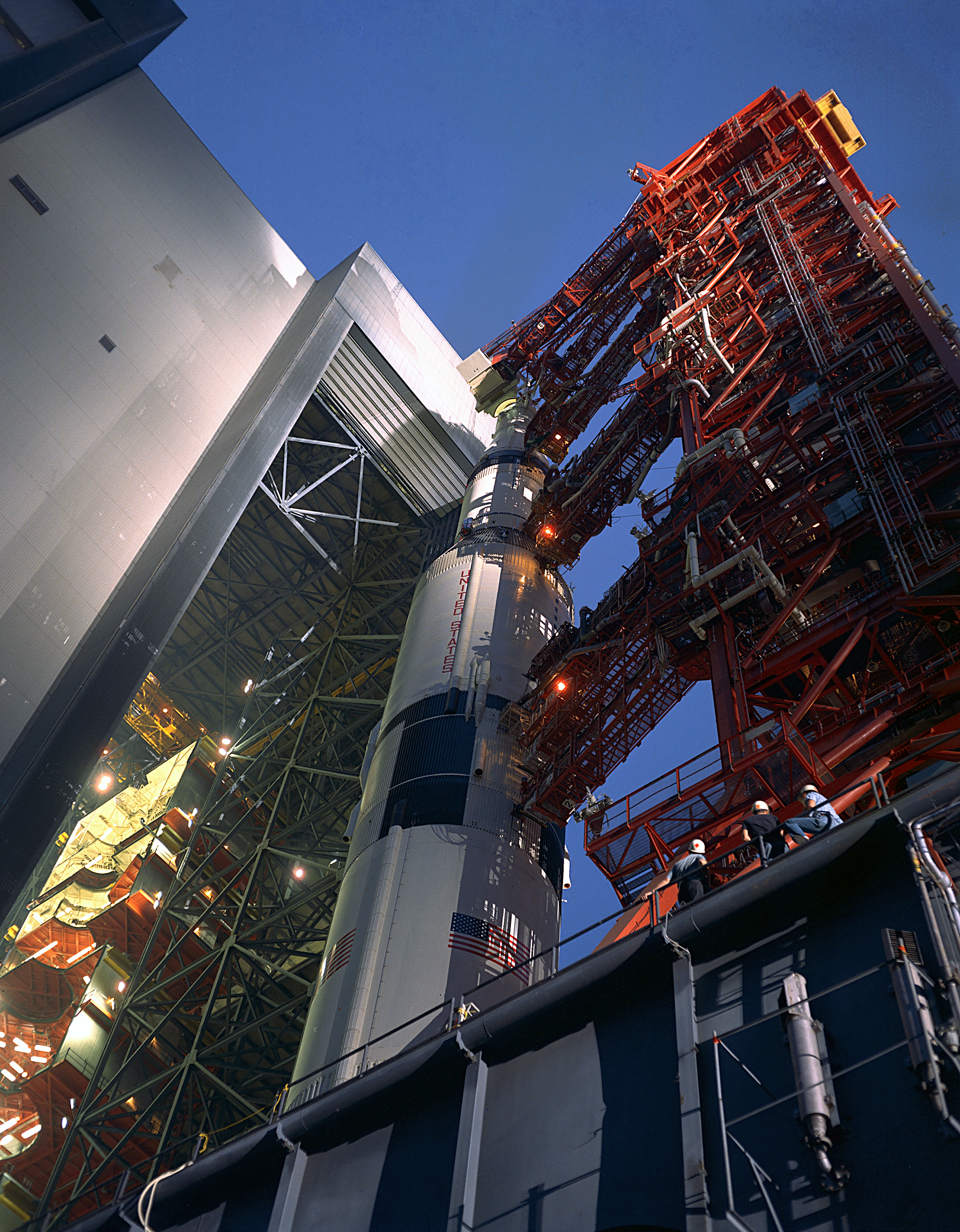
Artist’s concept of Hubble Robotic Servicing and De-orbit Mission architecture.
Image courtesy Frank J. Cepollina
Furthermore, although the Clementine mission was a successful low-cost technology demonstration that surveyed the moon and flew past an asteroid, a recent lessons learned study of the mission by the National Research Council found different “cultures” operating within the DoD and NASA. Differences included greater resources available to DoD than to NASA, a sense of urgency for military projects as compared with a more leisurely pace of civilian programs, less involvement by Congress and reduced micromanagement by the DoD, and a more focused, task-force-like management style at the DoD that contrasted with the broad, participatory approach associated with NASA missions. But all these challenges have been overcome on successful collaborations in the past and can be again as long as teams of highly motivated and dedicated professionals remain aware of the them.
The ultimate goal of a NASA–DoD collaboration is to enhance the United States’ ability to close the gap between concepts and implementation while reducing cost. A combined effort would maximize the United States’ limited robotics research funding at a time when it trails countries such as Japan, Germany, and Russia in this area. This collaboration would provide benefits including servicing, upgrade, and refueling opportunities for expensive NASA, DoD, and other strategic assets in low- and high-Earth orbits, as well as existing commercial communications satellites in geosynchronous orbits. It would also help facilitate the needed merger between human and robotic space flight, establish the United States’ preeminence in robotic space flight, and maintain U.S. dominance in human on-orbit servicing.
Note: While Frank J. Cepollina is the project manager in charge of Hubble Space Telescope servicing, this article reflects his personal (not official) ideas about the potential for establishing a post-2014 national U.S. capability for repair upgrade and refueling of spacecraft in high-usage orbits.
About the Authors
 |
Frank J. Cepollina serves as deputy associate director for the Hubble Space Telescope Development Project at Goddard Space Flight Center. He is known as the “Father of On-Orbit Servicing” for his decades of leadership in repairing and upgrading satellites in orbit. In 2003 he was inducted into the National Inventors Hall of Fame. |
 |
Jill McGuire is the Robotics and Crew Aids and Tools manager for the Hubble Space Telescope program. She has been at Goddard Space Flight Center since January 1992 and with the Hubble program since 1998. |