



By Ray Morgan
The largest of all flying pterodactyls, the Quetzalcoatlus Northropi, had no tail. Its large beak and head at the end of a long neck, made flying it equivalent to shooting an arrow backwards with its feathers in front. A major problem requiring solution before designing and building the final version, was to determine if we could overcome this instability with an automatic system. The system used natural features of the real animal, but with electronic sensors and electrical servos.
It was late in the day, in the summer of 1985. twilight had come, the sun was down and the sky was getting darker, making colors hard to distinguish. Lights were coming on around us — beyond the two-lane highways that formed the boundaries of the mile-square abandoned farming field.
Following a series of delays and last-minute fixes and changes, I felt compelled to make the first tail-less flight of our “yaw model” for the pterodactyl today. Over and over, we had managed to keep its nose into the wind by strapping it to a swivel chair base on the roof of my van. We had repeatedly launched the bird with a “launch trolley” fitted with a standard tail and wheels. All that was left for this phase of the project was to prove that we could launch the full-sized bird, release the trolley cleanly, and have it automatically stabilize itself in flight with no tail.
Conditions were not very good — it was getting difficult to see details of the faked-out, radio-controlled bird even from just 50 feet away, and we were all tired from working late the previous night and through the day. We urgently needed to prove that the autopilot could wiggle the head, fingers, and wing ailerons fast enough to stabilize the bird. Otherwise, we would not be able to build the complete version in time to make the filming dates for the Smithsonian’s IMAX movie, On the Wing.
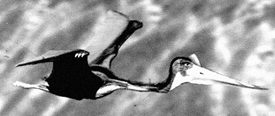
The Quetzalcoatlus Northropi in flight.
“What could go wrong?” I asked myself, but thinking on my feet at this point was too difficult. Feeling too much pressure, too tired, and too hopeful it would work, I stepped on the foot switch that started the towline winch. The crude, half-scale replica of the 36-foot flying reptile rapidly accelerated toward a return pulley staked down a quarter of a mile away. I kept my left index finger touching the emergency parachute release, which was designed to allow the 45-pound robotic dinosaur to float down with (hopefully) minor damage. “The big guy would have gone for it, too,” I told myself. 1
My doubts began to grow as the model’s form began to blend into the darkening landscape, and bounce down the dirt road toward the setting sun. I pulled back on the stick (by faith more than vision) and the bird rotated and began its rapid ascent upward, finally appearing in profile as it shot above the horizon in the distance. The backlit darkness distorted my judgment of its distance and altitude, so I listened as the electric winch seemed to slow down. I commanded a hard left bank to turn the model away from the towline, effecting its automatic release. Half way through the turn, I switched on the autopilot. The large head turned side to side and simulated “fingers” wiggled on the outer wings.

The yaw model just before launching.
Seeing that the bird began to roll to wings level with the autopilot on, I knew it should be safe to release the stabilizing trolley and tail. I aimed the model back past our vantage point as it glided down from its release point, 600 feet above the ground. We commanded the release of the stabilizing trolley, hoping to see the bird model fly straight on its own. But it didn’t quite work as planned.
Instead of simply falling away from the bottom of the pterodactyl’s belly, the tailboom dropped down and to one side slightly, but remained attached (loosely) to the yaw model.
I had a quick choice to make. I could immediately deploy the recovery chute, or I could try to shake the trolley loose by commanding control hard-overs. Deploying the chute could stop forward flight and reduce the fall rate, or it could tangle in the trolley and cause the whole mess to crash down together. I decided to try to shake it loose. 2
I had to be careful because the bird, at best, was expected to be conditionally stable without the tail. This meant that small perturbations from straight and level flight could be handled by the autopilot, but very large ones would cause the bird to “swap ends” in a real hurry. Gradually I applied more and more violent control inputs, trying to shake off the reluctant trolley.

The grounded yaw model.
At last, the trolley and tail assembly fell free. Unfortunately, the bird was also approaching the edge of the field. I had been so focused on the trolley, and the motions of the model, I hadn’t kept an awareness of how far it had flown away in the dark sky. Worse yet, the yaw model was tumbling out of control, and it appeared to be falling towards the two-lane road between the field and the horse stables. I quickly scanned for car lights, but didn’t see any … small relief.
| WHY YAW? When an airplane turns left or right, it is said to “yaw.” The yaw axis can be envisioned as a vertical string suspending the aircraft about its center of mass. For the pterodactyl, the shape of its large head made it develop strong aerodynamic forces about this axis. With the head being so far in front of the center of mass, and with no vertical tail to counteract the forces it could develop, it made the replica want to turn and face backwards. To solve this problem, we had to make the head part of the active control system. In fact, we found we also had to use the “fingers” out on the wings (as spoilers), and use warping of the wings to assist the head. The latter two devices increased drag near the wing tips to help the head keep pointing into the wind. |
Suddenly, the bird rebounded back up from about 40 feet above the ground. It had hit some high-tension wires running along the roadway. At this point, everything seemed to take place in slow motion. It cartwheeled back away from the roadway, and toward the field … a big relief.
I was waiting for some type of electrical event, but it seemed at first we had been very lucky. Then I noticed a wave moving through the wires toward me, and then reflecting back from a pole and propagating toward where the bird struck.
KABOOM!! There was the brightest flash that I have ever seen in real life. An arc between the wires made a large ball of an intense white — almost a miniature sun. It reminded me of movies I had seen of the first atomic test at Alamogordo. Then I heard a sharp, short, electrical buzzing noise behind me. Immediately, the entire neighborhood … houses, streetlights, and the horse arena beyond the road … went dark, as wires fell from a transformer to the ground.
There was a sizable crowd out to see this first flight attempt — families and friends of my employees, mainly. When the bird first fell out of control, there were screams. When the bright flash went off with a large boom, there was a collective, “Uh-Oh!” After the bird had settled to the field and everyone recognized there were no serious consequences other than blacking out a large fraction of the small town of Moorpark, CA, hysterical laughter set in. I, however, was not laughing. One of the flight team members (a natural comedian), yelled, “Well … I’ll see you guys later.”
I had made some serious errors in judgment, and I was kicking myself mentally, while at the same time steeling myself for dealing with the repercussions. The first thing I needed to do was to call the power company and get someone out to repair the downed line. The second thing, which I was dreading the most, was to speak to the owner of the horse arena, who was obviously going to lose some income for the evening. I was just finishing a call to the power company on a mobile phone, when I saw the stable owner crossing the road, looking for someone to blame.

The yaw model was towed to a height of 600 feet before beginning its glide down.
Surprisingly, when I explained what had happened, apologized, and offered restitution, everyone was quite reasonable. The power company guys thought it was funny (total repair bill only about $600) and when the stable owner found out what it was we were testing, he even refused compensation.
We had taken pride in the fact that, as a company, we were quick to put prototypes in the air when developing innovative aircraft, and could rapidly learn what the real problems were to make changes faster than most aerospace companies could develop analytical models. And, to a large degree, there is much merit in testing unique designs in flight as soon as possible, particularly with sub-scale models. I still support that.
However, like in all of life, there is a balance. Here, we found that we had gone too far to the side of “hurry up and get something in the air,” and it actually cost time and money, rather than saving it. What’s more, we had been extremely lucky that no one was injured, or even killed. The model was not that big at 45 pounds, but it certainly could have done serious damage when falling hundreds of feet. We were very lucky not to have hit a car driving down the road, or someone walking on the ground. The power lines could have hit and even electrocuted someone when they fell.
In hindsight (there was a lot of discussion among the team) we recognized that we (me, mainly) were just too impatient to get into the air, particularly with a potentially lethal flight vehicle. Because of this and other similar experiences, we ended up with what I consider a very good rule: no work on the aircraft the day before a planned flight test. By bringing patience into the flight test program, it gave us a chance to re-think what we were doing, and look for stupid plans or actions before we went to the field.
To sum it up, it is good to rapidly put prototypes into the air and learn the real problems. Irv Culver, famed engineer of the old Lockheed Skunk Works, was a champion of this approach. That said, there is a time for patience in the test world to allow one to think everything through, to create a plan for predictable events, and to make sure nothing obvious has been overlooked. Finding that balance is critical to being a good project manager.
Epilogue
The Quetzalcoatlus Northropi full-flying replica, with wing flapping, automatic stabilization — and nearly life-like appearance matching the paleontologists precise specification — made its first successful flight on January 7, 1986, one week before filming was begun in Death Valley, CA. Twenty-two successful flights were made for the movie, for which it became the main star. The movie, On the Wing, produced by Francis Thompson and directed by Bailey Silleck, was shown at IMAX theaters at the Smithsonian Air and Space Museum and around the country.
About the Author
 |
Ray Morgan is head of Morgan Aircraft and Consulting and a Senior Technical Advisor to NASA. Morgan oversaw the development of more than 35 Unmanned Aerial Vehicles (UAVS), including NASA’s HELIOS and Pathfinder Aircraft, during his tenure at Aerovironment, Inc. his other ASK features appeared in ASK 16 and ASK 18. |
1My boss, and the founder of our company, had sold the idea of a flying replica of the largest flying animal ever that ever lived to the Smithsonian and to its primary sponsor, Johnson Wax. He had made the task sound easy, with the famous words “If nature did it 65 million years ago, it should be easy to replicate today.”
2The bird’s chute was designed to be deployed when free of the trolley; the trolley itself had its own chute that automatically would open once it left the bird.


